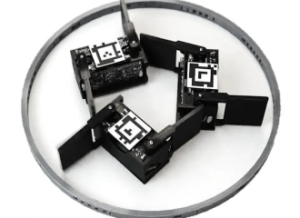
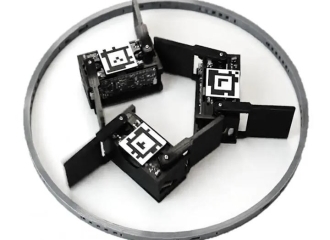
实验使用的smarticle机器人组 图片来源:ThomasA.Berrueta
19世纪,科学家和工程师们发展了统计力学这一学科,对简单粒子群如何在有序与无序间转换做出预测,例如一群随机碰撞的原子如何固定下来,形成结构均一的晶格。
更具有挑战的是对更为复杂的粒子的集群行为进行预测。在该情况下,粒子会在自身能量驱动下运动。这种系统存在于鸟群、细菌群落和机器人群中,被称为活性物质(active matter)。
《科学》(Science)杂志2021年1月报道,一个由物理学家和工程师组成的团队提出了一条新的原理,可以描述活性物质系统,可以自发变得有序,而不需要更高层次的指令,甚至不需要个体智能体(agents,指能自主活动的软件或者硬件实体)之间的程序交互。该团队已在多种系统中验证了这一原理,包括被称为智能活性粒子(smarticle)的周期性变形机器人组。
该理论的提出者Paval Chvykov当时是美国麻省理工学院(MIT)Jeremy England教授的博士生,现为佐治亚理工学院物理学院研究员、博士。他认为,某些在动力学上足够混乱的活性物质将自发地发现研究人员所说的“低振动”状态。
“振动是指物质吸收能量,并将其转化为随机运动。”England说,“当这种运动更剧烈或更随机时,振动将变得更强烈。相反,低振动状态要么非常轻微,要么非常有序,也可能同时具备这两种特征。所以我们的想法是,如果物质和能量来源允许系统达到低振动状态,整个系统将不断随机重新排列,直至达到这个低振动状态并保持。如果你通过特定方式提供了能量,那么对应的状态将找到一种方式,指引物质的运动最终达到该状态。”

图片来源:Pixabay
为了进一步发展这一理论,England和Chvykov从19世纪末的瑞士物理学家Charles Soret发现的现象中得到了灵感。Soret在实验中观察到,将均匀的盐溶液放在处于不同温度区间的试管中,盐会立即在低温区聚集,表现为这一区域的盐浓度增加。
Chvykov和England曾试图开发多个数学模型来证明低振动理论,但直到联系上佐治亚理工学院Dunn家族物理学教授Daniel Goldman,他们才成功验证了该假设。
Goldman说:“几年前我看到England主讲的一个研讨会,那时我就想到我们的一些smarticle机器人或许能够验证这个理论。”两位博士生William Savoie和Akash Vardhan与访问Goldman实验室的Chvykov博士合作,设计了将3个摆动的smarticle包裹在一个环中的实验,与该理论进行对比。几位博士生观察到,机器人没有表现出复杂的运动,也不会探索容器的各个角落,而是会自发组织,产生几种舞蹈动作——比如其中的一支舞蹈是通过这三个机器人依次拍打彼此的手臂完成的。这些舞蹈能够产生持续数百次的摆动,然后突然失去稳定性,继而被另一种舞蹈形式所取代。
在首次证明这些简单的舞蹈实质上是低振动状态后,Chvykov博士与西北大学的工程师Todd Murphey教授以及博士生Thomas Berrueta取得合作。该团队曾开发出更为精细、可控性更高的smarticle。这种更高级的smarticle能够允许研究者测试理论的局限性,包括舞蹈的类型和数量如何因不同的手臂摆动模式而发生变化,以及如何控制这些舞蹈。“通过控制低振动状态的序列,我们能够使系统达到能做有用工作的状态。”Berrueta说。西北大学的研究人员表示,这些发现可能对于微型机器人群、活性物质和超材料(meta materials)具有广泛的实用意义。

图片来源:Pixabay
England指出:“对于机器人群体来说,即使单个机器人相对便宜且计算简单,也可以在一个群体中实现许多自适应和智能群体行为。对于活细胞和新型材料研究来说,在新材料或计算属性方面,这可能有助于理解原子或蛋白质‘群体’能为你带来什么。”
翻译:谢一璇
审校:戚译引
引进来源:佐治亚理工学院

本文来自:中国数字科技馆
特别声明:本文转载仅仅是出于科普传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或其它相关事宜,请与我们接洽。
[责任编辑:环球科学]